帝京サイエンスキャンプ・宇都宮工業高校・出張授業「サイボーグ技術」
Keyword:サイボーグ,表面筋電位,動作識別,人支援技術開発,ブレインコンピュータインタフェース.
人の運動機能や認知機能を補綴,強化,拡張する技術に関して概観します.また,人の倫理面に配慮した研究開発や世の中に技術を紹介する場合の社会的な影響などについても考えます.
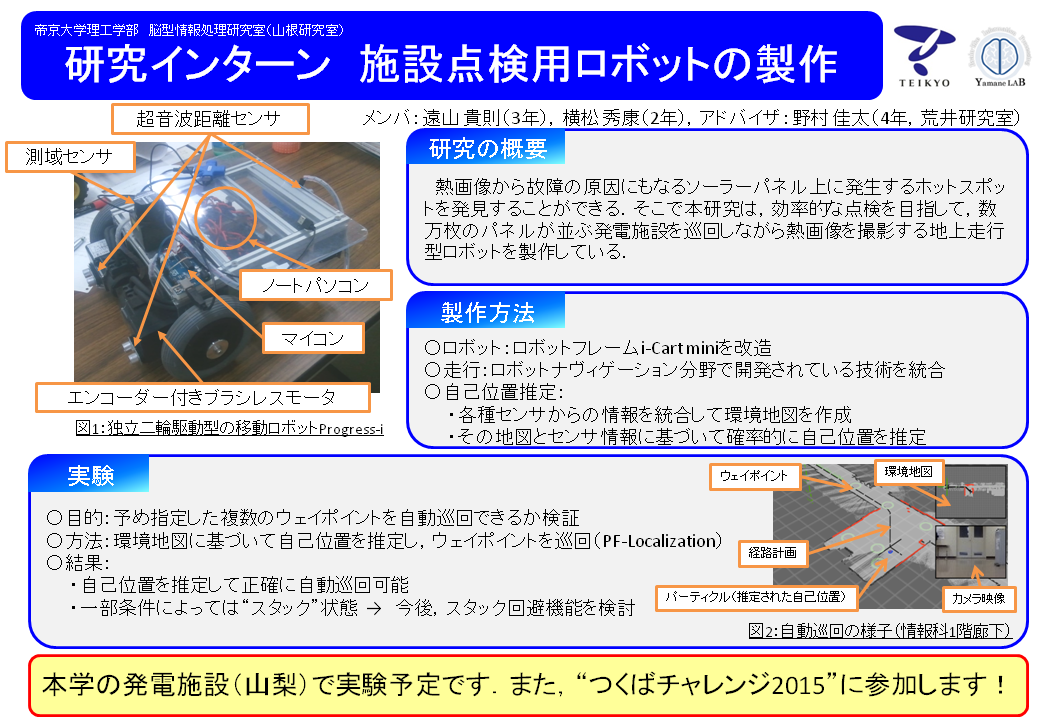
オープンキャンパス2015・研究室開放
Keyword:脳型情報処理,知的情報処理,ソフトコンピューティング,人支援技術.
我々の研究室の取り組みについて説明しました.
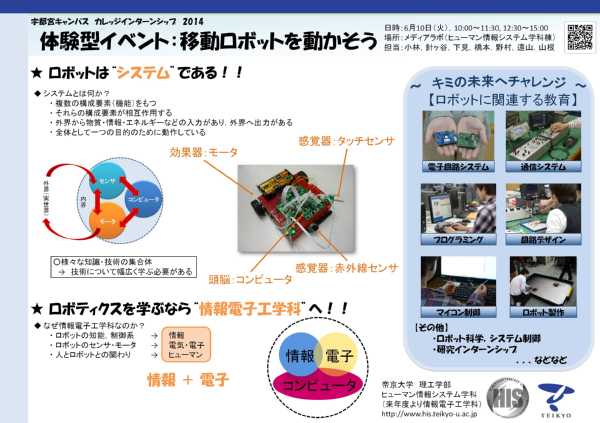
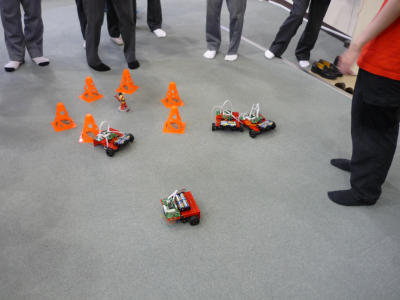
カレッジインターンシップ2015「移動ロボットを動かそう」

Keyword:移動ロボット,マイコン,センサ,モータ,学生インターン.
移動ロボットを用いて迷路課題を解く簡単な課題を通して,ロボットやプログラミングの楽しさを体験しましょう.また,研究インターン生の活動の報告を聞いてみましょう.
帝京サイエンスキャンプ2014「サイボーグ技術-人と機械・情報系の融合-」
Keyword:サイボーグ,表面筋電位,動作識別,人支援技術開発,ブレインコンピュータインタフェース.
腕の筋電位信号を使ってアームロボットを動かすシステムを紹介します.このデモを導入にして,様々な人支援技術の開発について話をします.
オープンキャンパス2014「人の運動をはかろう」
Keyword:Kinect,筋電計,人支援技術.
Kinectを使った運動計測や筋電位信号の計測から人間の動作を推定する方法までを体験的に説明します.また,人支援へ応用を目指す研究についても説明します.
カレッジインターンシップ2014「移動ロボットを動かそう」
Keyword:移動ロボット,マイコン,センサ,モータ,学生インターン.
移動ロボットのプログラミングを体験してみましょう.センサやモータをうまく用いて,ライントレース課題にチャレンジします.また,学生インターンとして研究している学部生の取り組みについても紹介します.
◆イベント風景
 |
 |
 |
 |
 |
 |
 |
 |
◆担当履歴
2014年度
- 2013.06.10(予定):カレッジインターンシップ2014,体験型イベント,移動ロボットを動かそう
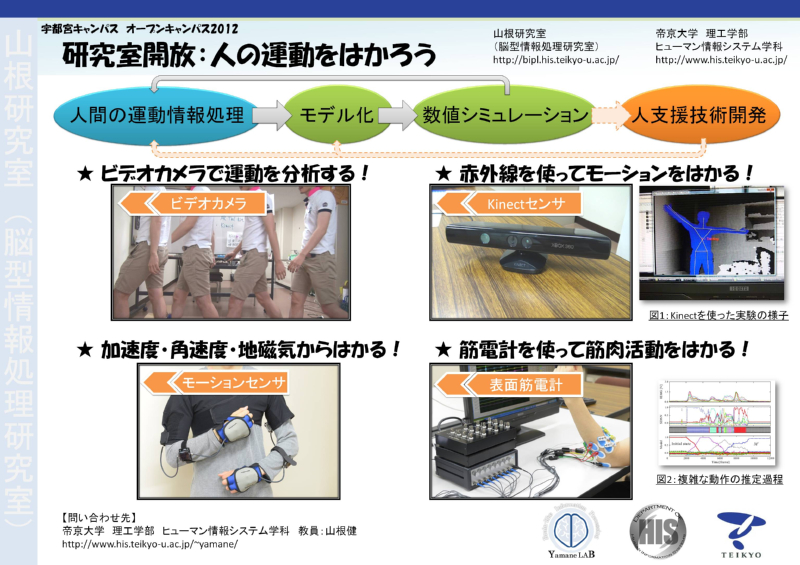
オープンキャンパス2013「人の運動をはかろう」
Keyword:筋電位信号,動作推定,Kinect,ビデオカメラ,モーションセンサ.
Kinectを使った運動計測や筋電位信号の計測から人間の動作を推定する方法までを体験的に説明します.また,人支援へ応用を目指す研究についても説明します.
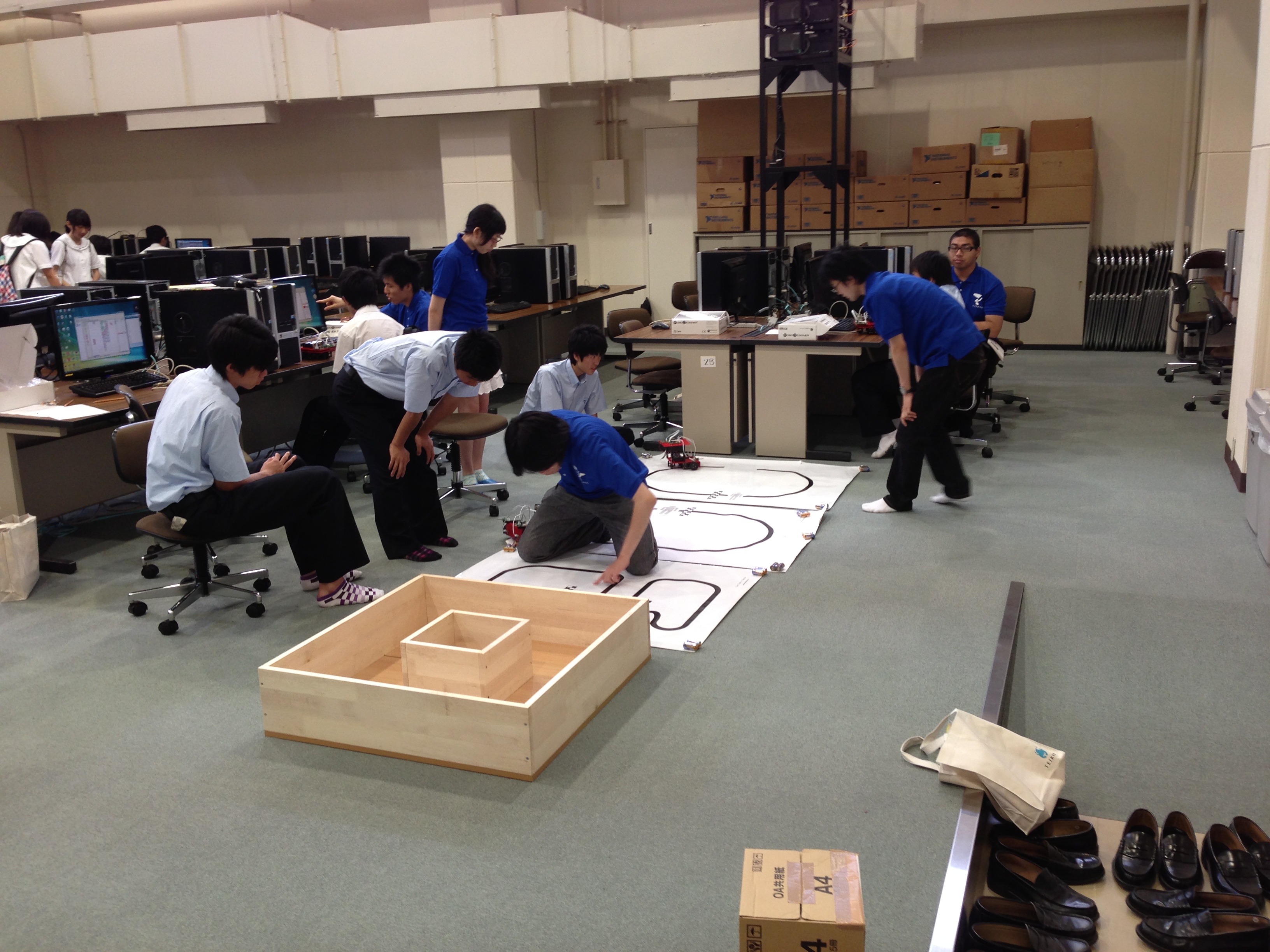
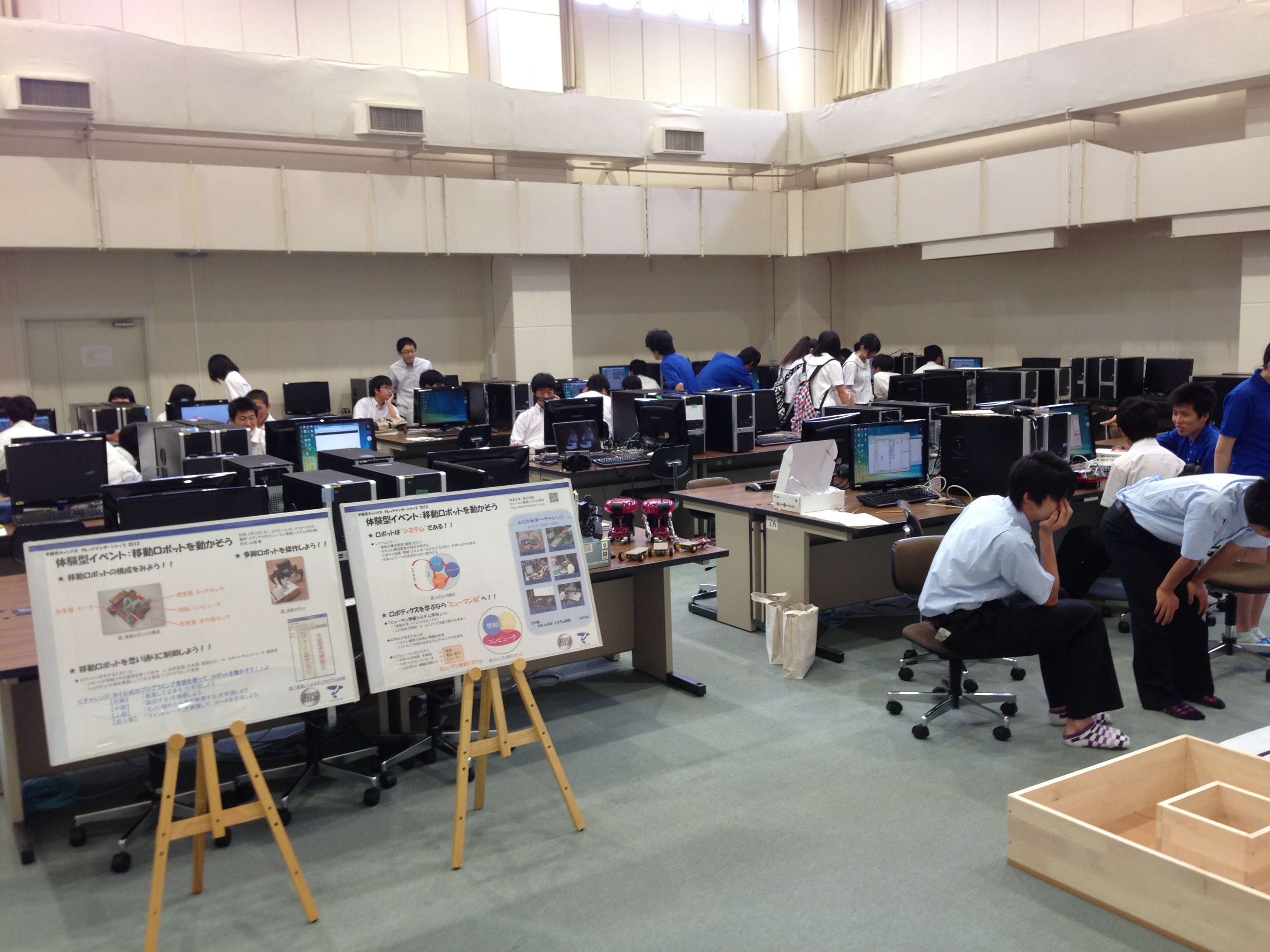
カレッジインターンシップ2013「ロボットを動かそう」
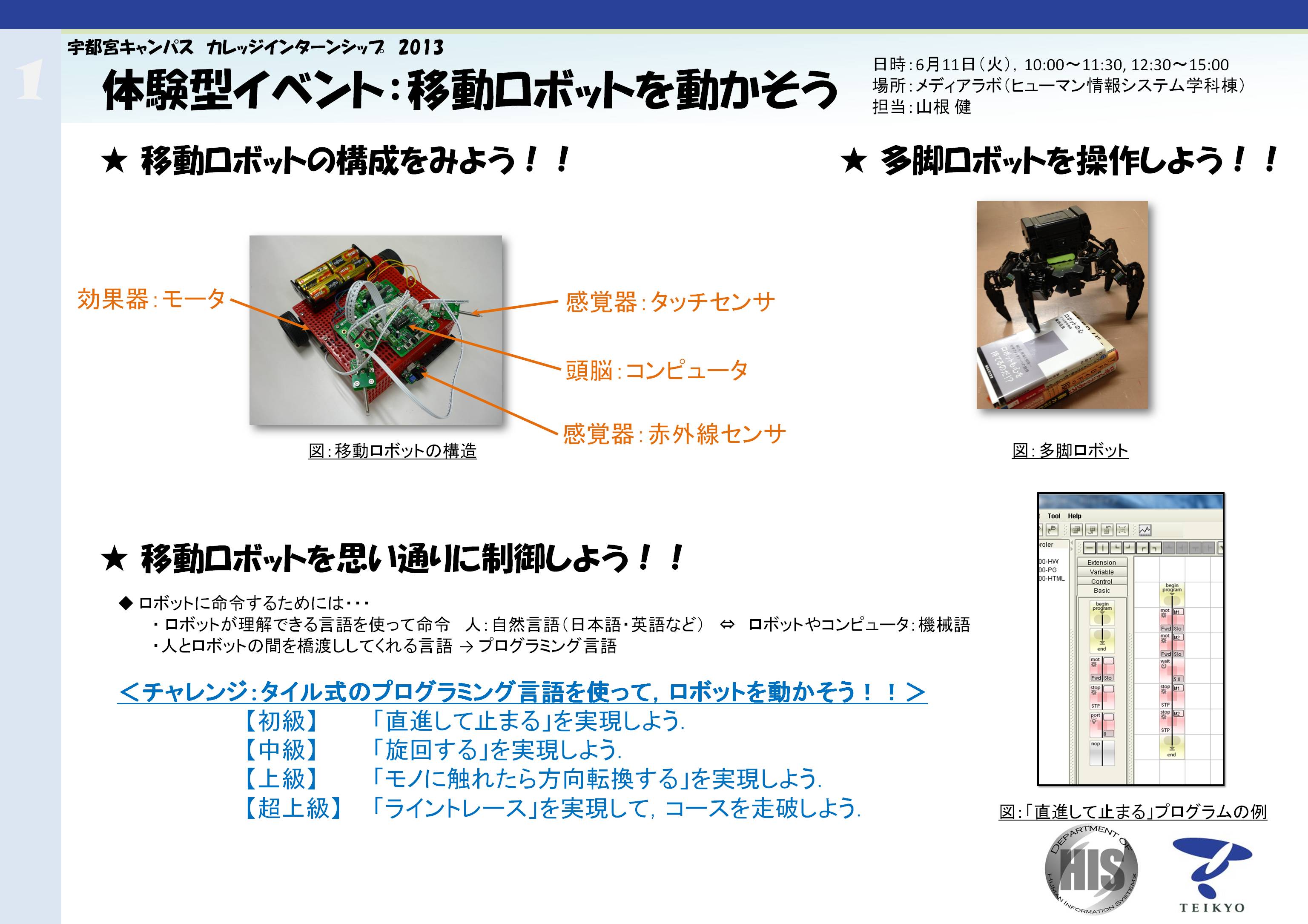
Keyword:ロボット,マイコン,センサ,モータ,プログラミング.
ロボットを自分で動かすことで,大学でどのような演習が行われているかを体験的に知ることができます.
作新学院「ロボティクス」
Keyword:ロボティクス,マイコン,人支援技術.
ヒューマン科の紹介とロボティクス関連のカリキュラムについて説明しました.模擬実習や研究紹介などでは,積極的な質問があり,今時の高校生の姿勢に驚きました.
コロンバス大「筋電を使ったアーム制御のデモシステム」
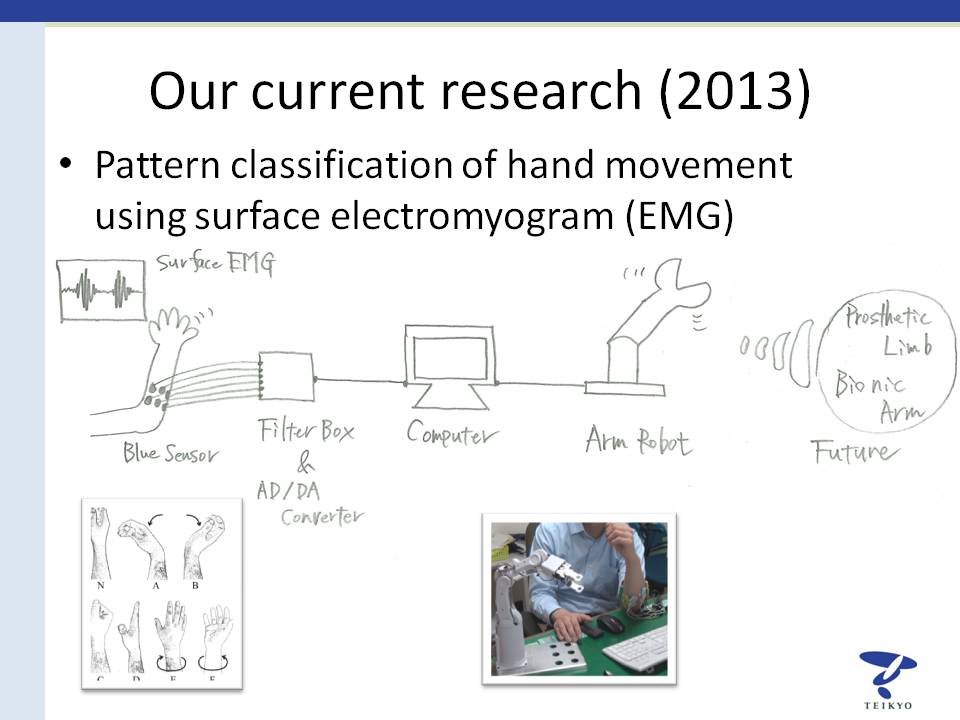
Keyword:Electromyogram, SDNN, Pattern classification, Arm robot.
We showed a arm robot control system. The system classifies hand movements using surface EMG signals.
帝京サイエンスキャンプ「脳の計算モデル -ニューラルネット-」
Keyword:錯視,脳の計算モデル,脳型情報処理,推論,筋電位.
脳の情報処理の不思議さを感じて,その計算モデルについて学びましょう.また,本研究室で開発している脳型推論システムや表面筋電位からの動作を予測するシステムなど最新の研究についてもお話しします.
◆イベント風景
 |
 |
 |
 |
 |
 |
◆担当履歴
2013年度
- 2013.08.04:オープンキャンパス,研究室開放,人の運動をはかろう
- 2013.06.25:つくば国際戦略総合特区の産学官マッチング・デイ2013,デモ展示,筋電によるアーム制御
- 2013.06.24:益子芳星高校(2回),帝京サイエンスキャンプ2013,3D立体映像システム
- 2013.06.18:大学院進学希望者(内部向け),研究室開放
- 2013.06.15:作新学院高校英進部,帝京サイエンスキャンプ2013,3D立体映像システム
- 2013.06.11:カレッジインターンシップ2013,体験型イベント,移動ロボットを動かそう
- 2013.06.05:作新学院高校,ロボティクス,講義&ディスカッション
- 2013.05.24:コロンバス州立大学,短期留学,模擬講義の一部,筋電を使ったアーム制御のデモシステム
- 2013.05.17:作新学院高校総合進学部,帝京サイエンスキャンプ2013,出前講義,脳の計算モデル -ニューラルネット-
オープンキャンパス2012「人の運動をはかろう」
Keyword:Kinect,モーションキャプチャ,表面筋電位,動作推定.
人の歩行や上肢の運動を様々な方法で取得してみよう.これらセンサシステムの原理,応用方法などを体験的に学ぼう.また,筋電位から腕の複雑な運動を推定する研究についての話を聴こう.
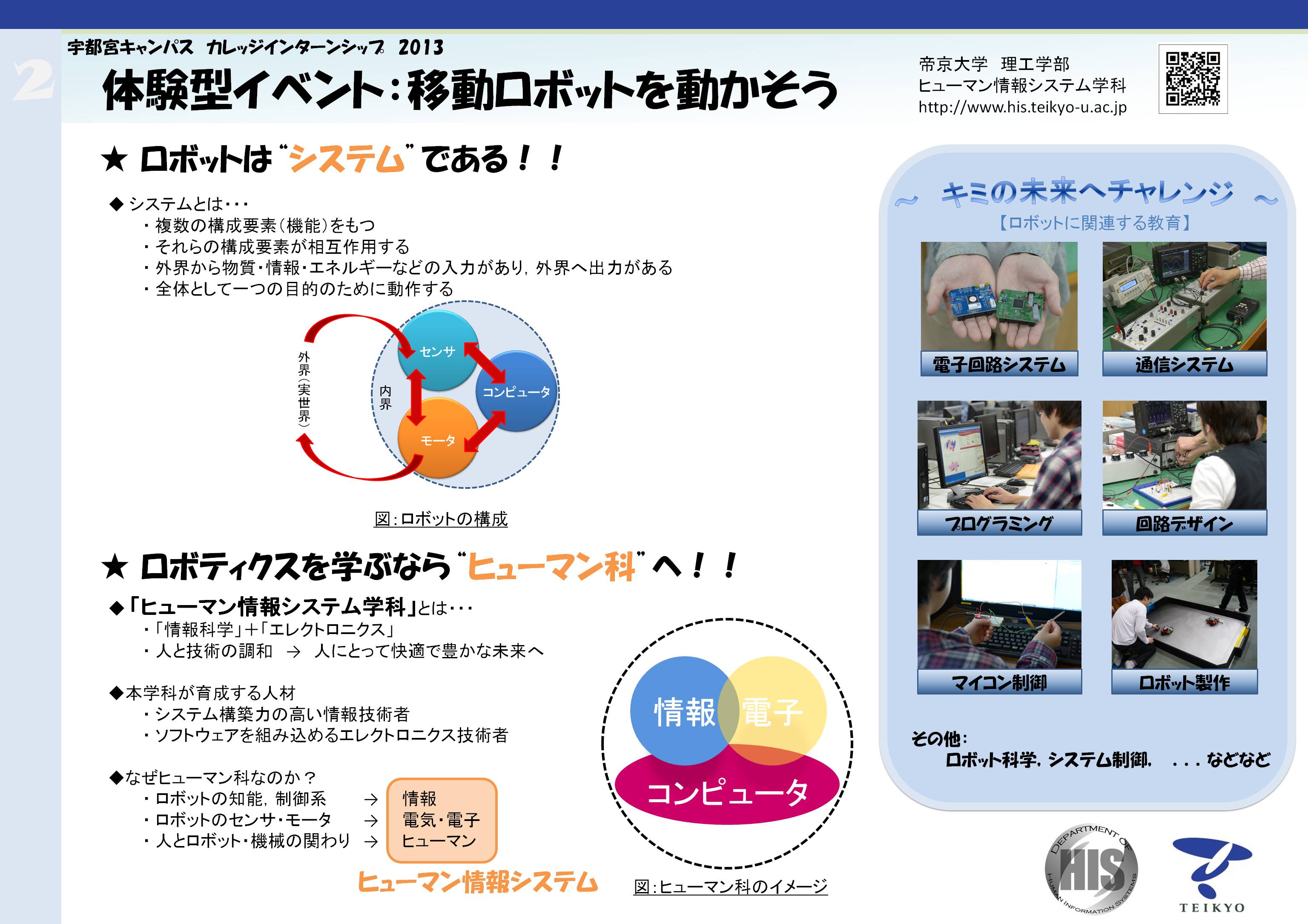
カレッジインターンシップ2012「ロボットを動かそう」
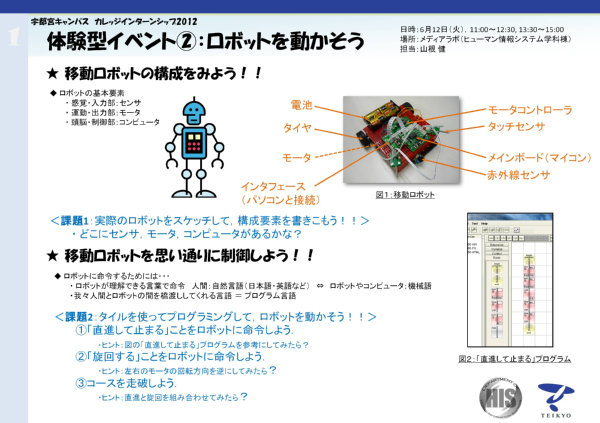
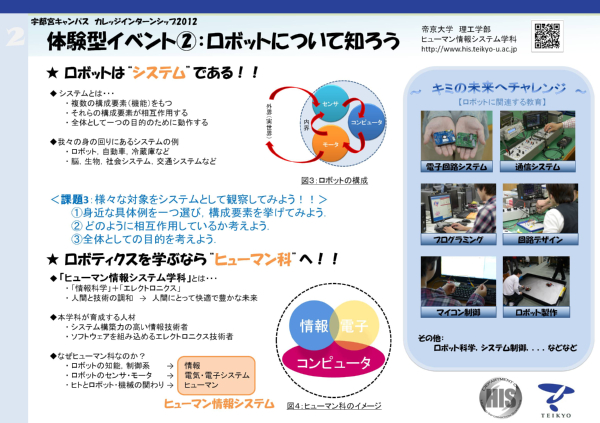
Keyword:移動ロボット,マイコン,センサ,モータ,プログラミング,システム.
実際の移動ロボットを動かすことで,センサ・モータ・マイコンなどのロボットの基礎的な知識を体験的に学びましょう.また,対象をシステムとして見てみよう.
◆イベント風景
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
◆担当履歴
2012年度
- 2012.06.09:佐野高校,3D立体映像システム
- 2012.06.12:カレッジインターンシップ2012,体験型イベント②,ロボットを動かそう
- 2012.07.21:オープンキャンパス2012,ヒューマン情報システム学科展示室開放,研究紹介
- 2012.07.22:オープンキャンパス2012,研究室開放,人の運動をはかろう
プログラミング
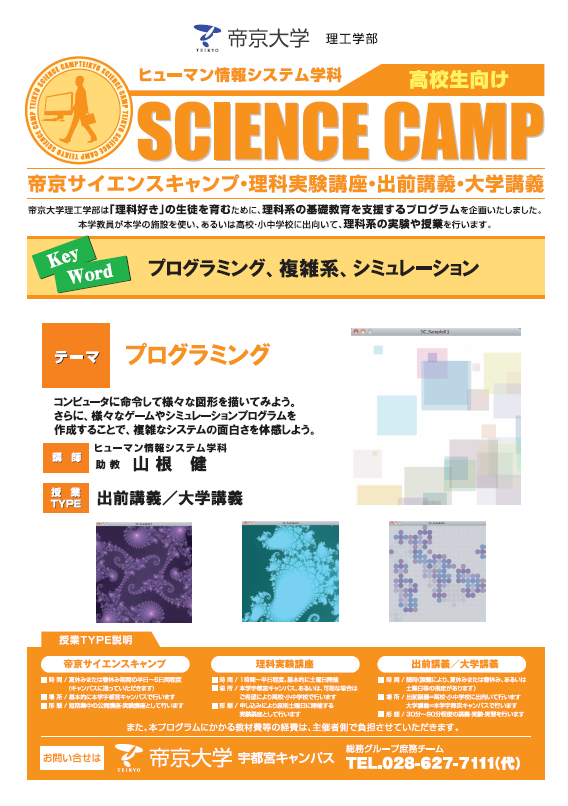
Keyword:プログラミング,複雑系,シミュレーション,ライフゲーム,Procsssing.
コンピュータに命令して様々な図形を描いてみよう.さらに,様々なゲームやシミュレーションプログラムを作成することで,複雑なシステムの面白さを体感しよう.
ゲームを作りたいけれど,「初心者だから」や「難しそうだから」と敬遠している人にも,分かりやすく,初歩から実習します.これをきっかけにに,科学的な計算にも興味を持ってもらえると楽しいですね.
脳の計算モデル-ニューラルネット-
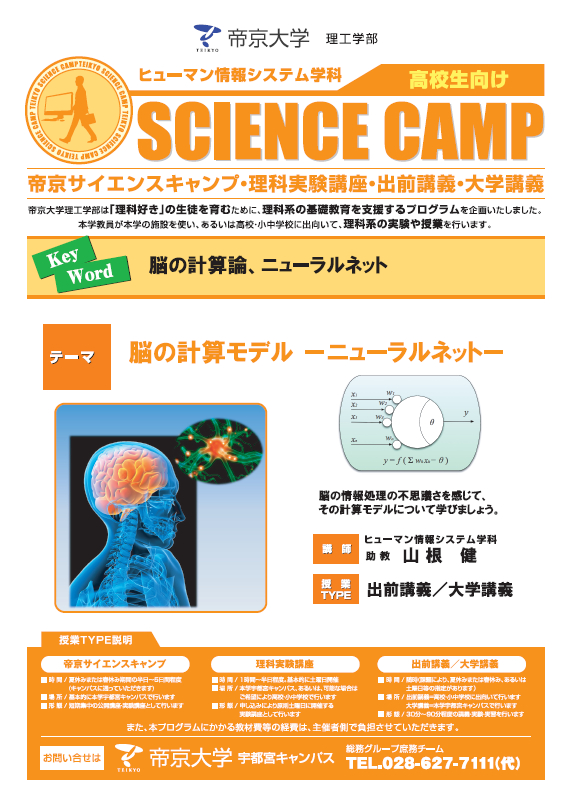
Keyword:錯視,視覚系,運動系,脳の計算論,ニューラルネット,ピッツ・マカロックのモデル.
脳の情報処理の不思議さを感じて,その計算モデルについて学びましょう.紹介するモデルは非常に単純で,計算では掛け算と足し算だけしか使いませんので安心です.
◆担当したサイエンスキャンプ・施設見学の履歴
2011年度
- 2011.07.26:山村学園高校,3D立体映像システム
- 2011.08.04:南那須地区中学校教育研究会理科部会,3D立体映像システム
- 2011.09.28:今市高校,3D立体映像システム
- 2011.11.16:リハビリセンター,3D立体映像システム
- 2011.12.06:白鵬大学足利,グラフィカルプログラミング&3D立体映像システム
- 2012.01.20:鹿沼商工高校,グラフィカルプログラミング
- 2012.02.18:宇都宮市環境学習センター,3D立体映像システム